
Currently working on:
- Include orientation (from PCA) to GTSAM point landmarks
- Fine-tuning Semantic Segmentation Model for higher precision/recall
Object-SLAM for 2D Semantic Mapping (Grounded-SAM 2 + GTSAM)
A 2D object-centric SLAM system: Grounded-SAM 2 produces semantic landmarks, and a GTSAM factor graph jointly optimizes robot pose (SE(2)) and landmark positions to yield an object-level BEV map and a smoothed trajectory.
Demo — Tracking + GTSAM Optimization
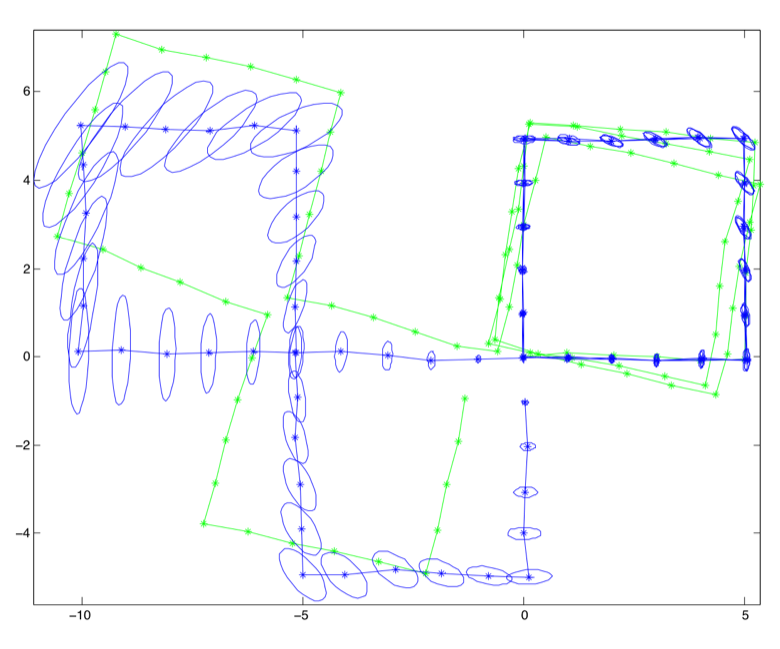
End-to-end (perception → LiDAR-in-mask → tracking → GTSAM) yields a smoother trajectory and a coherent object map. Stable IDs persist across frames; landmarks tug the pose into global consistency.
- Pose: drift reduced; turns tighten after optimization.
- Landmarks: buoys posts cluster with reasonable covariance.
System Overview
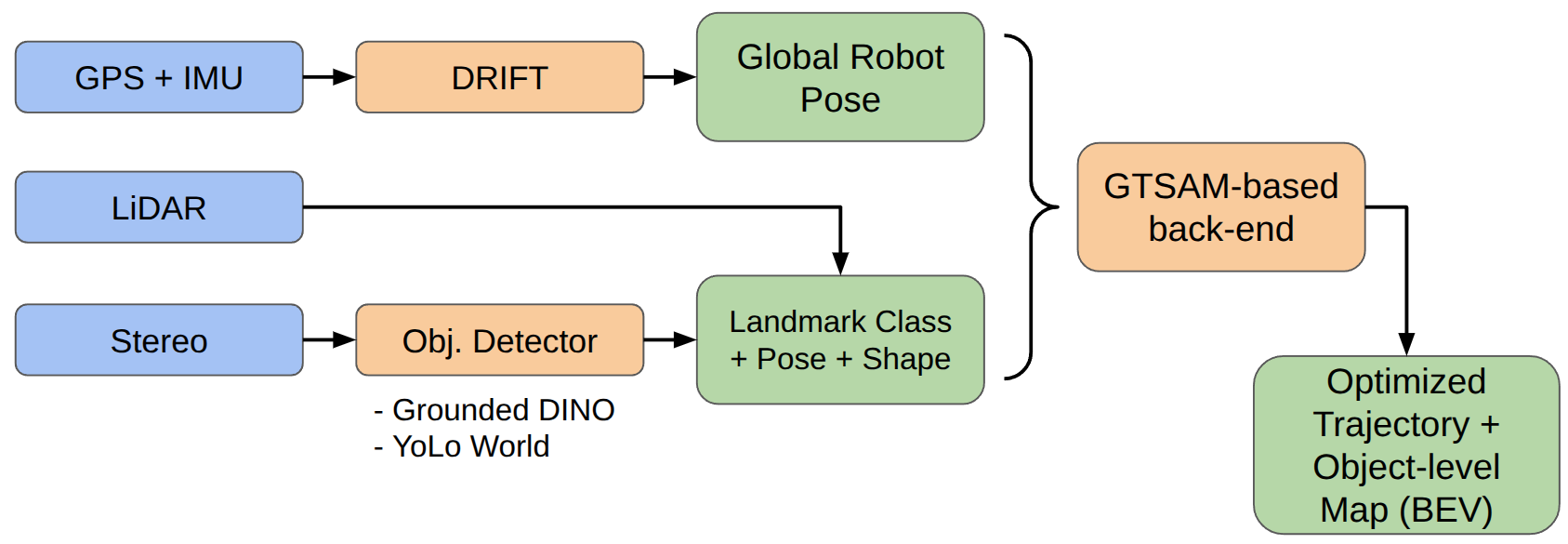
- GPS+IMU → DRIFT: supplies a global pose prior.
- LiDAR / Stereo → Detector: Grounded-SAM 2 / open-vocab models output masks, boxes, labels.
- Landmarks: class + pose/shape cues with uncertainty.
- Back-end: GTSAM optimizes poses and landmarks into a coherent object map.
Why GTSAM?
GTSAM frames SLAM as a factor graph—variables linked by probabilistic factors—and solves it with Gauss-Newton/LM or iSAM2 for incremental updates. It cleanly fuses odometry and object measurements with proper noise and robust losses.
Factors in This Project
- PriorFactor<Pose2>: anchors the frame at t=0 (tight covariance).
- BetweenFactor<Pose2>: odometry as (Δx, Δy, Δθ) with Σodom.
- Bearing/Range factors: BearingRangeFactor<Pose2,Point2> (θ, ρ), or bearing-only when range is weak; robust loss for mask outliers.
Together: prior fixes gauge, odometry propagates motion, object factors enforce global consistency → cleaner trajectory and semantic BEV.
Perception — Open-Vocabulary Detection
YOLO-World handled zero-shot prompts (buoy, dock post/face, cone, sign) but produced many false positives. Switching to Grounded-SAM 2 (GroundingDINO prompts + SAM masks) improved precision and boundary quality, so we proceed with Grounded-SAM 2. I plan to fine-tune it for maritime scenes to raise precision/recall and calibrate confidence scores.
In the future, I’ll fine-tune Grounded-SAM 2 to boost detection precision/recall and produce more calibrated confidence scores in maritime scenes.
Range from Segmentation — LiDAR Inside the Mask
For each Grounded-SAM 2 mask, LiDAR is projected into the camera, and only in-mask points are pooled. Median range and centroid form a robust per-object measurement used by tracking and SLAM.
For each Grounded-SAM 2 mask, LiDAR is projected into the camera, and only in-mask points are pooled. Median range and centroid form a robust per-object measurement used by tracking and SLAM.
- Projection: LiDAR → camera → pixels; keep points inside the mask polygon.
- Pooled stats: ρ = median(‖p‖), centroid ĉ = median({pi}), quality = {N, spread (MAD/IQR)}.
- Output: {label, θ, ρ, centroid, Σ, N}; drop if N < Nmin or spread too large.
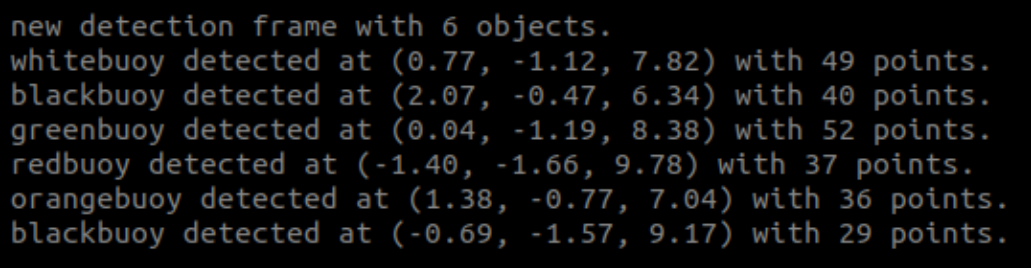
Masks give clean spatial support, so medians suppress water/glare outliers. The console summary (e.g., “greenbuoy … with 52 points”) reflects these pooled values.
Tracking Algorithm
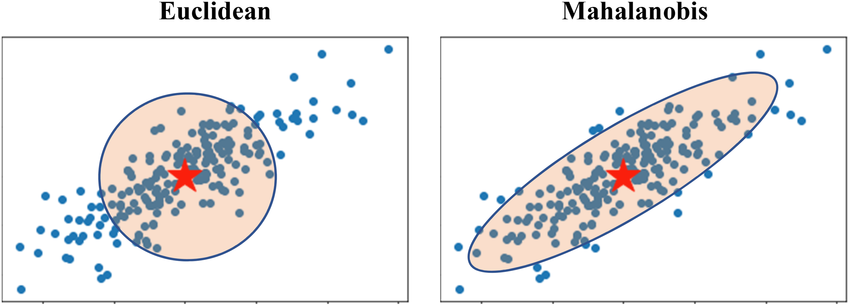
Object detections are associated to existing tracks using Mahalanobis distance. Because range is noisier than bearing in our setup (LiDAR/camera-to-odom projection), the innovation covariance is elongated along range, so we gate with an ellipse rather than a circle.
Detections are matched to tracks with Mahalanobis gating. Because range is noisier than bearing, the innovation covariance is elongated along range, so the gate is an ellipse, not a circle.
- Predict: xpred, Ppred
- Innovate: y = z − h(xpred), S = H Ppred Hᵀ + R
- Gate: d² = yᵀ S⁻¹ y ≤ τ (χ² threshold)
- Assign: nearest-neighbor (or Hungarian) within gate
- Update: K = PpredHᵀS⁻¹; x = xpred + Ky; P = (I − KH)Ppred
- Manage: create new tracks for ungated detections; age out unmatched tracks
Takeaway: Mahalanobis gating respects the uncertainty geometry, reducing false matches and stabilizing IDs for the GTSAM factors.