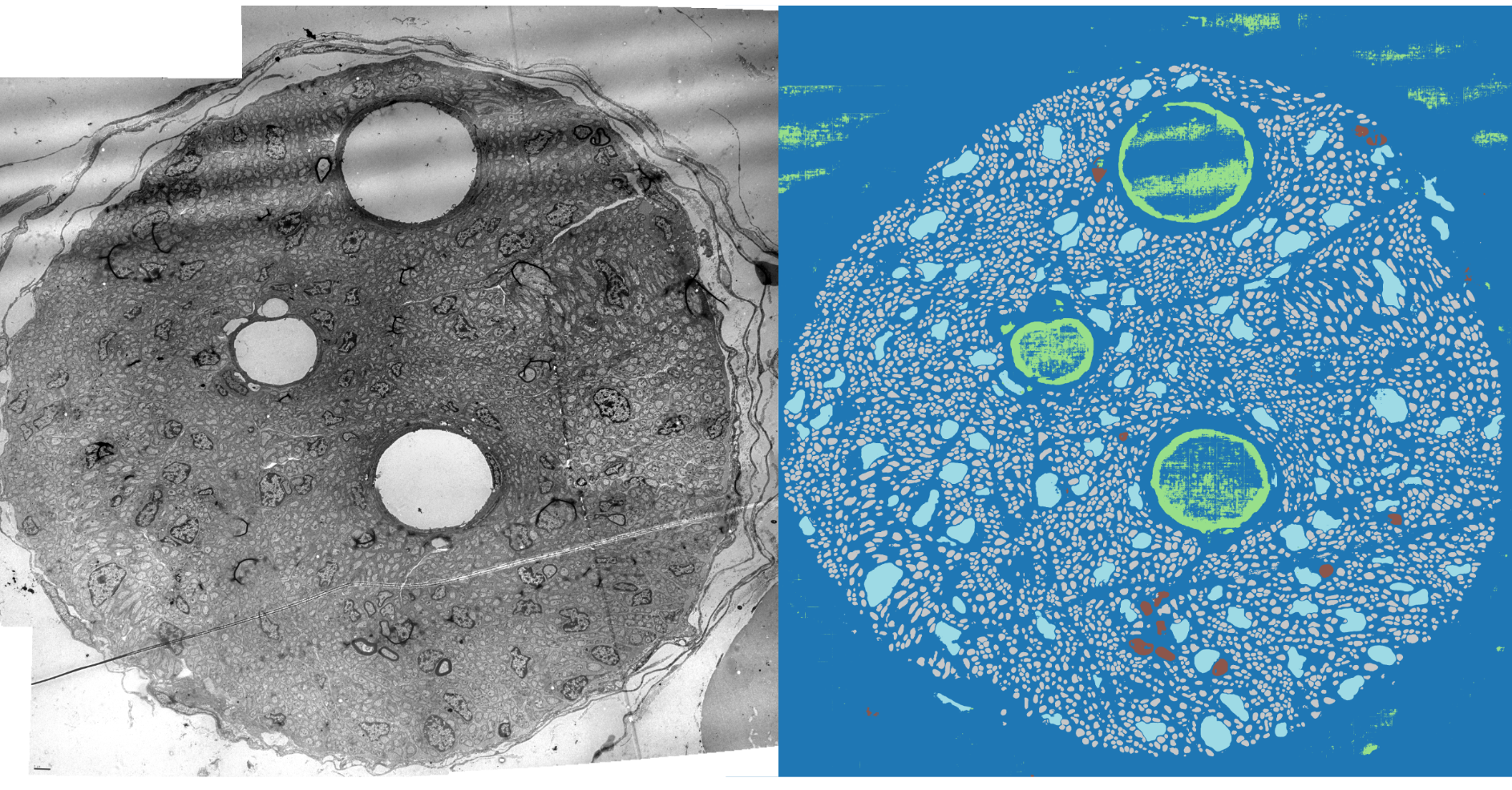
Zero-shot masks → tracked landmarks → SE(2) factor graph for a clean, metrically consistent object map and smoothed trajectory.

About Me
I'm a Master’s student in Robotics at the University of Michigan, advised by Prof.
Maani Ghaffari
at the Computational Autonomy and Robotics Laboratory (CURLY).
My research focuses on robust 3D perception and state estimation in unstructured environments.
I am currently architecting a semantic-aware SLAM that fuses object detections, geometric primitives, and odometry
into a unified GTSAM factor graph to achieve metrically consistent mapping.
In parallel, I serve as the sole researcher for an industry-sponsored project with the Honda Research Institute,
designing robust 3D pose estimation and localization frameworks for autonomous marine vessels.
Previously, I led robotic fleet deployment at Amazon Robotics and studied Mechanical Engineering at UIUC.
Work Experience
 |
Amazon Robotics 01/2025 - 06/2025 Robotics System Eng Co-op |
 |
Hinetics 08/2023 - 12/2023 Mechanical Eng Intern |
Education
 |
University of Michigan 08/2024 - Present M.S. in Robotics |
 |
University of Illinois Urbana-Champaign 08/2020 - 05/2024 B.S. in Mechanical Engineering |
Active Projects
Calibrated Monocular Depth on the WAM-V
Depth-Anything V2 scaled to meters via inverse-depth fit; project RGBD to colored point clouds and validate against LiDAR in VRX and field runs.
Completed Projects

Vision-Guided 5-DoF Arm: Pick & Place with RealSense
ROS 2 pipeline with camera calibration, block/depth detection, and IK. Built teach-and-repeat motions and tuned speeds for reliable autonomous grasping.
Mobile Robot: SLAM + A* Exploration
Implemented PID velocity control with gyrodometry; built occupancy-grid SLAM with MCL in C++; executed A* planning and frontier-based exploration.
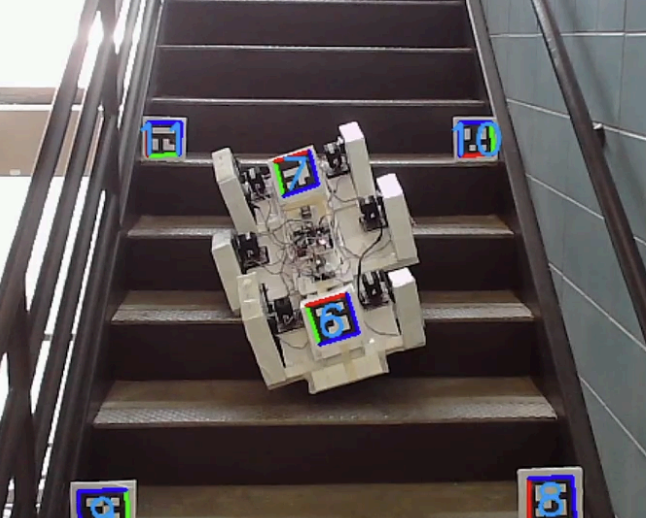
Hexapod Staircase Edge Detection
AprilTags + homography with background extraction, Radon-based edge finding, and peak detection to localize stair edges for gait analysis.